Page Not Found
Page not found. Your pixels are in another canvas.
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
Our full-day workshop has been selected for IROS 2023 at Huntington Place in Detroit, Michigan, USA
Published:
Following the geometric approach, our implementation features efficient C++ code and provides analytical gradients. Please feel free to give it a try!
Published:
On June 4th, we will organize the workshop from 09:00am to 05:00pm in time zone: GMT +8.
Published:
This is the first frictional impact model in three dimensions developed for robot applications. As an illustration, the figure below shows the moments corresponding to (1) the initial state, (2) the end of compression, and (3) the end of restitution during the impulse evolution. 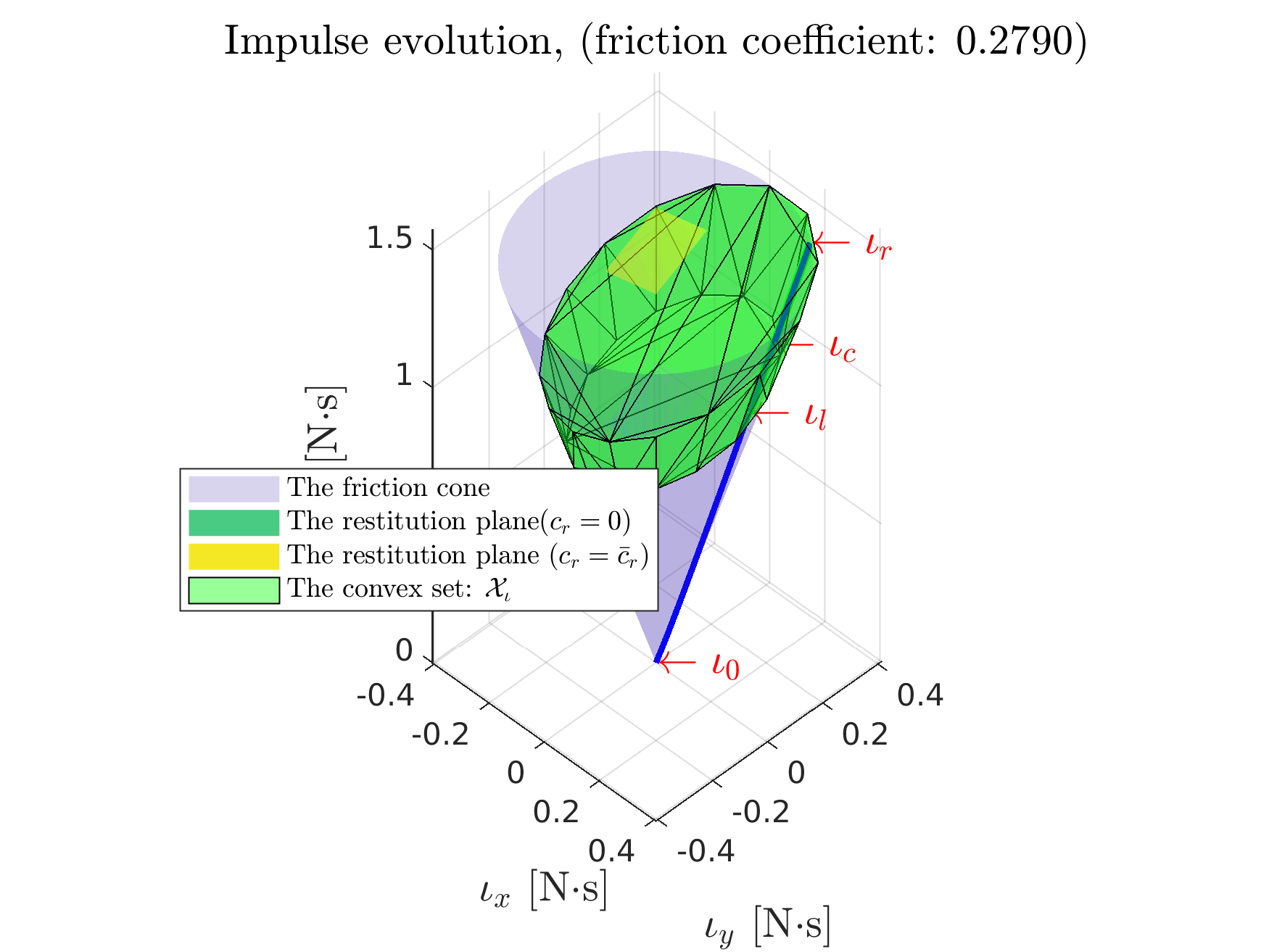
Published:
We enable swift robot motion without fearing impacts with the environment. For instance in a box manipulation task, the robot does not need to stop or use close-to-zero velocity to establish contacts 
We provide the optimization-based robot control approach that enables a modular description of robotic tasks and a reactive solution in real-time. 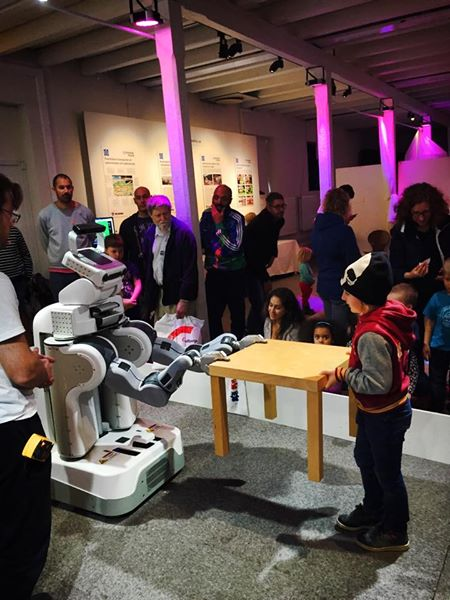
Published in 51st IEEE Conference on Decision and Control, 2012
We introduce a two step method that transforms the position-based visual servoing problem into a convex optimization problem with linear constraints.
Recommended citation: (2012). " A transformation of the position based visual servoing problem into a convex optimization problem " 51st IEEE Conference on Decision and Control. https://ieeexplore.ieee.org/document/6426022
Published in 19th IFAC World Congress, 2014
We proposed the quadratic programming approach for dual-arm manipulation tasks, i.e., a pan cleaning task performed with Schunk arms equiped with ATI force-torque sensor.
Recommended citation: (2014). " Dual Arm Manipulation using Constraint Based Programming" 19th IFAC World Congress. https://www.sciencedirect.com/science/article/pii/S1474667016416332
Published in 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2015
We propose to use a Virtual Kinematic Chain (VKC) to specify the common motion of the parallel manipulators mounted on a mobile base, instead of commanding the two manipulators kinematics independently.
Recommended citation: (2015). " Cooperative control of a serial-to-parallel structure using a virtual kinematic chain in a mobile dual-arm manipulation application" 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems. http://urn.kb.se/resolve?urn=urn:nbn:se:kth:diva-179638
Published in International Journal of Humanoid Robotics, 2016
Optimization-based approach that enables a dual-arm mobile manipulator to comanipulate with an human operator.
Recommended citation: (2016). " Whole body control of a dual-arm mobile robot using a virtual kinematic chain" International Journal of Humanoid Robotics. http://www.csc.kth.se/~yuquan/paper/ijhrYuquan.pdf
Published in 2016 IEEE International Conference on Robotics and Automation, 2016
A quadratic programming approach to tele-operate a mobile robot.
Download here
Published in IEEE-RAS International Conference on Humanoid Robots, 2018
We use the Bayesian Optimization procedure to regulate the soft task-priorities of a quadratic programming controller.
Recommended citation: (2018). "Sample-efficient learning of soft task priorities through bayesian optimization." IEEE-RAS International Conference on Humanoid Robots. https://ieeexplore.ieee.org/document/8624974
Published in Robotics: Science and Systems XV, 2019
We introduce the impact-awareness to the QP controller by including the gradient of impact-induced state jumps with respect to the QP decision variables.
Recommended citation: Yuquan Wang AND Abderrahmane Kheddar. (2019). "Impact-Friendly Robust Control Design with Task-Space Quadratic Optimization. " Robotics: Science and Systems XV. http://www.roboticsproceedings.org/rss15/p32.html
Published in Robotics and Computer Integrated Manufacturing, 2019
We achieved whole-body collision avoidance with quadratic-programming with soft and strict task priorities.
Recommended citation: Wang, Yuquan and Wang, Lihui (2019). " Whole-body collision avoidance control design using quadratic programming with strict and soft task priorities. " Robotics and Computer Integrated Manufacturing . https://www.sciencedirect.com/science/article/pii/S0736584518303405
Published in IEEE-RAS International Conference on Humanoid Robots, 2019
We present our initial efforts to apply impact-aware constraints for a floating-base robot.
Recommended citation: Wang, Yuquan and Tanguy, Arnaud and Gergondet, Pierre and Kheddar, Abderrahmane. (2019). "Impact-aware humanoid robot motion generation with a quadratic optimization controller. " IEEE-RAS International Conference on Humanoid Robots. https://arxiv.org/abs/2001.08454
Published in IEEE Robotics and Automation Letters, 2022
Evaluating the force measurements from 150 impact experiments, the best model-to-data matching suggests a viscoelastic contact-force model and computing the inverse inertia matrix (impulse-to velocity mapping) assuming the robot is a composite-rigid body
Recommended citation: Y. Wang, N. Dehio, and A. Kheddar, “On inverse inertia matrix and contact-force model for robotic manipulators at normal impacts,” IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 3648–3655, 2022. https://arxiv.org/abs/2109.04756
Published in IEEE Robotics and Automation Letters, 2022
Recommended citation: Dehio N, Wang Y and Kheddar A (2022) Dual-arm box grabbing with impact-aware model predictive control utilizing soft deformable end-effector pads. IEEE Robotics and Automation Letters 7(2): 5647–5654. https://hal.science/hal-03602884/document
Published in IEEE Robotics and Automation Letters, 2022
Recommended citation: Y. Wang, N. Dehio, and A. Kheddar, “Predicting post-impact joint velocity jumps on kinematics controlled manipulators,” IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 6226 – 6233, 2022. https://arxiv.org/pdf/2202.12646.pdf
Published in International Journal of Robotics Research, 2023
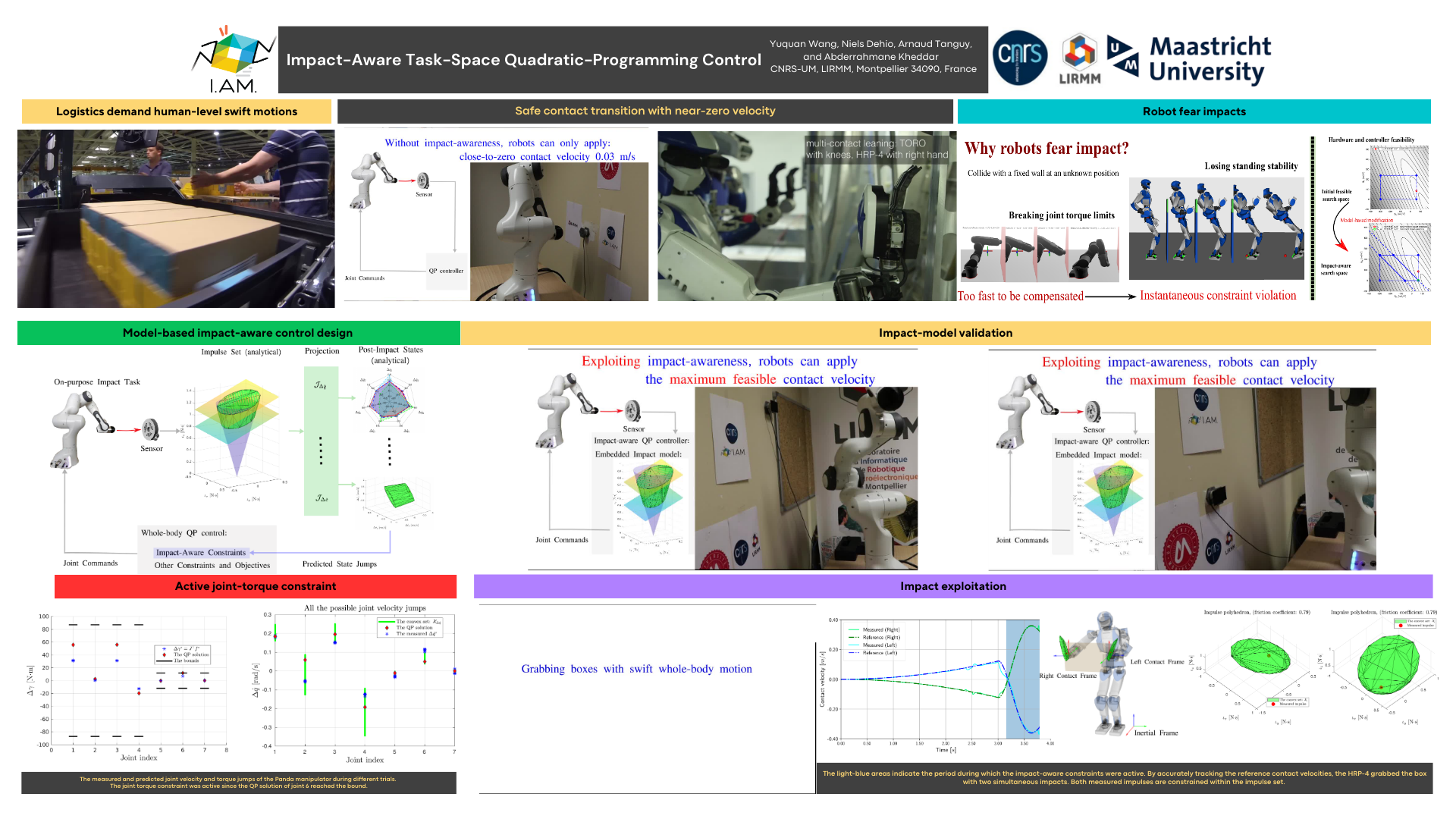
We summarize the impact-aware constraints formulation of the model-based quadratic-programming controller. The impact-awareness enables online filtering of the reference contact velocities such that all the constraints are respected despite the impact
Recommended citation: Wang, Y., Dehio, N., Tanguy, A., & Kheddar, A. (2023). "Impact-Aware Task-Space Quadratic-Programming Control. " International Journal of Robotics Research . https://arxiv.org/abs/2006.01987
Published:
Constraint-based programming is a modular approach to describe a complex task. We proposed to simultaneously minimize the error dynamics of each constraint by solving a quadratic optimization problem, see the details in the slides and the research paper using a pan cleaning example.
Published:
We envision a future where robots can assist human to manipulate bulky, or heavy objects. A mobile dual-arm robot is an ideal candidate for this purpose. During the week, our PR2 robot helped the public audiences, especially the children, to co-manipulate a table.
Published:
We documented the abstract and the slides. The recorded presentation will be on-line in the future.
Published:
Undergraduate course, KTH-Royal Institute of Technology, School of Computer Science and Communication, 2015
This is a entry-level Java programming course DD1346. I was responsible for the lab sessions and the homeworks.
Master Program Course, KTH-Royal Institute of Technology, School of Computer Science and Communication, 2015
Help the students of DD2423 with the Lab sesstions and grade the home works.
Undergraduate course, KTH-Royal Institute of Technology, School of Computer Science and Communication, 2015
This is a entry-level C programming course DD1324 for students not necessarily with an engineering or a scientific background. I was responsible for the lab sessions and the homeworks.