A Quadratic-Programming Approach to Dual-arm Mobile Manipulation
As a continuition of my Master thesis project back in 2010, I realized optimization is a powerful tool for specifying control problems with inequalities. We documented the first result for a visual servoing problem in the 51st IEEE CDC in 2012, where we addressed the visibility constraint for Position-based Visual servoing through the model predictive control approach.
The optimization formulation provides a modular approach to specify objectives and constraints. Using a pan-cleaning task performed by the Schunk light weight arms, we demonstrated at IFAC World congress 2014 the following:
- Quadratic programming (QP) provides a smoother trajectory compared to Linear programming (LP) thanks to its unique optimum.
- Task-space specifications, e.g., admittance control, can be easiliy integrated into the QP, either as a part of the objective or as a constraint.
- QP can simultaneously fulfill multiple objectives by scalarize a weighting sum.

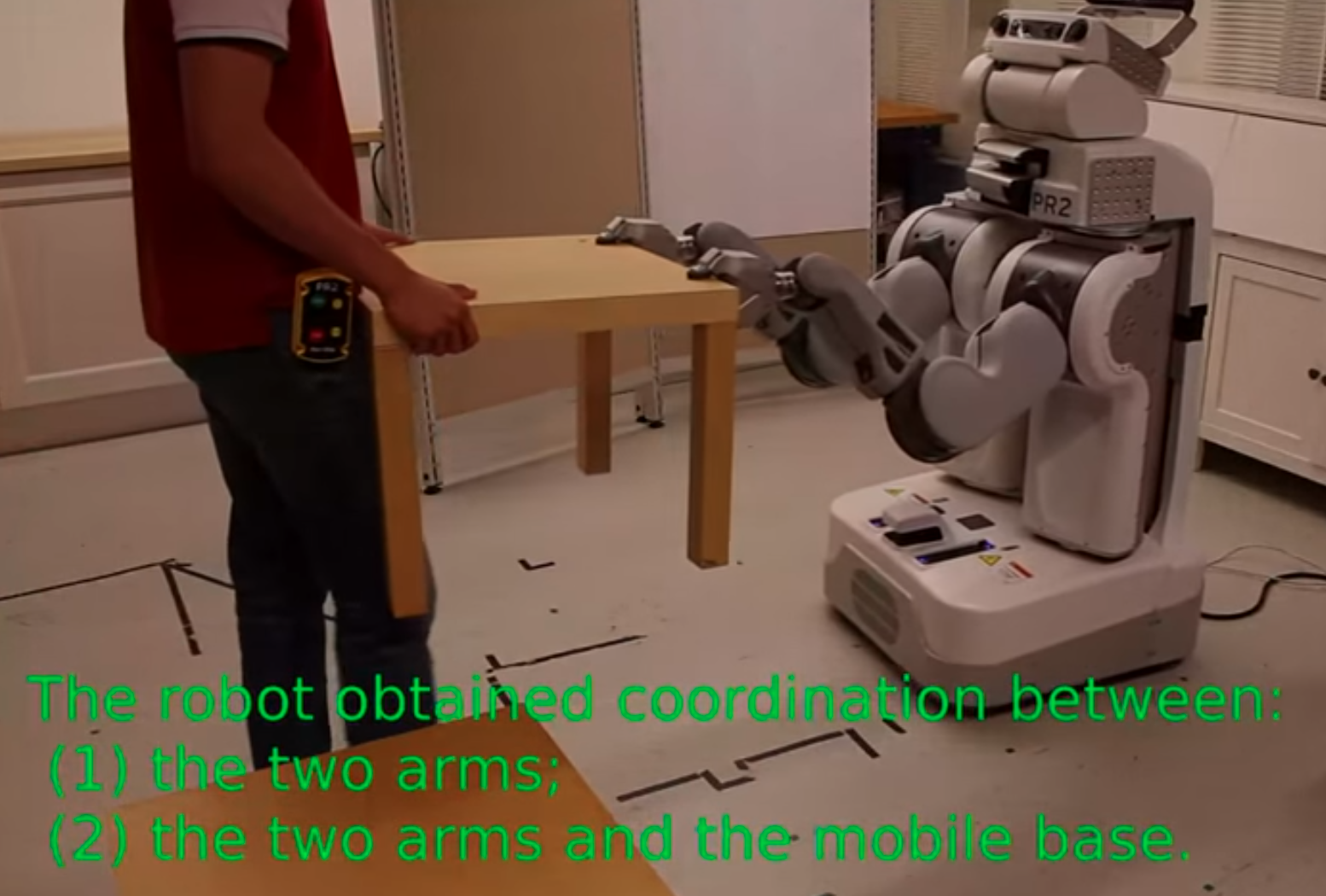
A mobile base increases the robot workspace thus enables a better potential for a robot to serve in our daily life. The PR2 robot is equiped with two 7 DOF arms and a 3 DOF mobile base. We address the synchronization of these three group of degrees of freedoms on the kinamatic level with a virtual kinematic chain. We presented the prellimenary result at IROS-2015 and documented it later at IJHR.
In a straight forward manner, we can apply the QP for tele-operation problems. We provided new controller mode for a 5 DOF manipulator mounted on the KUKA youbot at ICRA-2016.
Recently, I summarized the QP formulation and documented it at RCIM.