IJRR paper publicly available: Impact-Aware Task-Space Quadratic-Programming Control
Published:
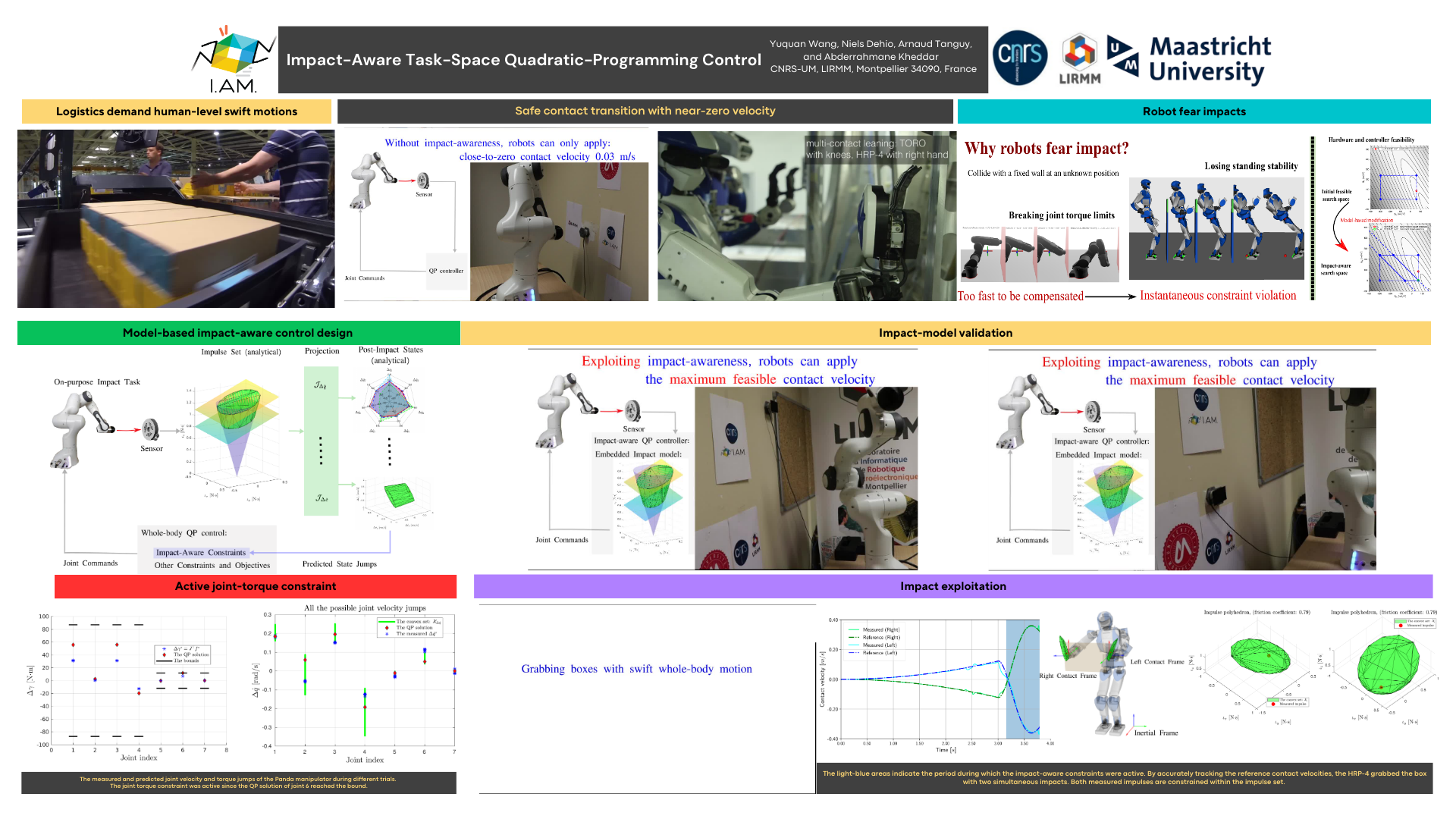
Excited to share our recently published paper in the International Journal of Robotics Research (IJRR): “Impact-Aware Task-Space Quadratic Programming”: https://doi.org/10.1177/02783649231198558
This work extends optimization-based reactive controllers by seamlessly integrating frictional impact mechanics in three dimensions alongside generic inequality constraints to handle impact-induced state jumps.
Being aware of the post-impact states, our HRP-4 humanoid achieved swift bi-manual pick-and-place operations, demonstrating remarkable agility: https://youtu.be/78xPQ_7qM4I?feature=shared
Special thanks to my colleagues Abderrahmane Kheddar, Arnaud TANGUY, and Niels Dehio, and our project coordinator Alessandro Saccon at TU Eindhoven.