Human-robot table co-manipulation demonstration at Forskning Pågår 2014
Date:
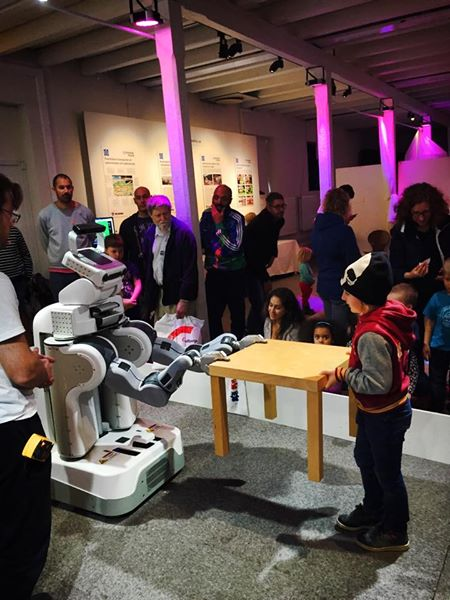
We envision a future where robots can assist human to manipulate bulky, or heavy objects. A mobile dual-arm robot is an ideal candidate for this purpose. During the week, our PR2 robot helped the public audiences, especially the children, to co-manipulate a table.
Despite the size of the table is big and the strength of a kid might be weak, the interactions are mostly successful except an unexpected case. A kid was smaller than the table and the PR2 robot was not able to find him/her through the camera. However thanks to the force-torque sensor measurement, the PR2 robot still sensed the motion from the human and accomplished the task as such.
 .
.  .
.  .
.  .
.