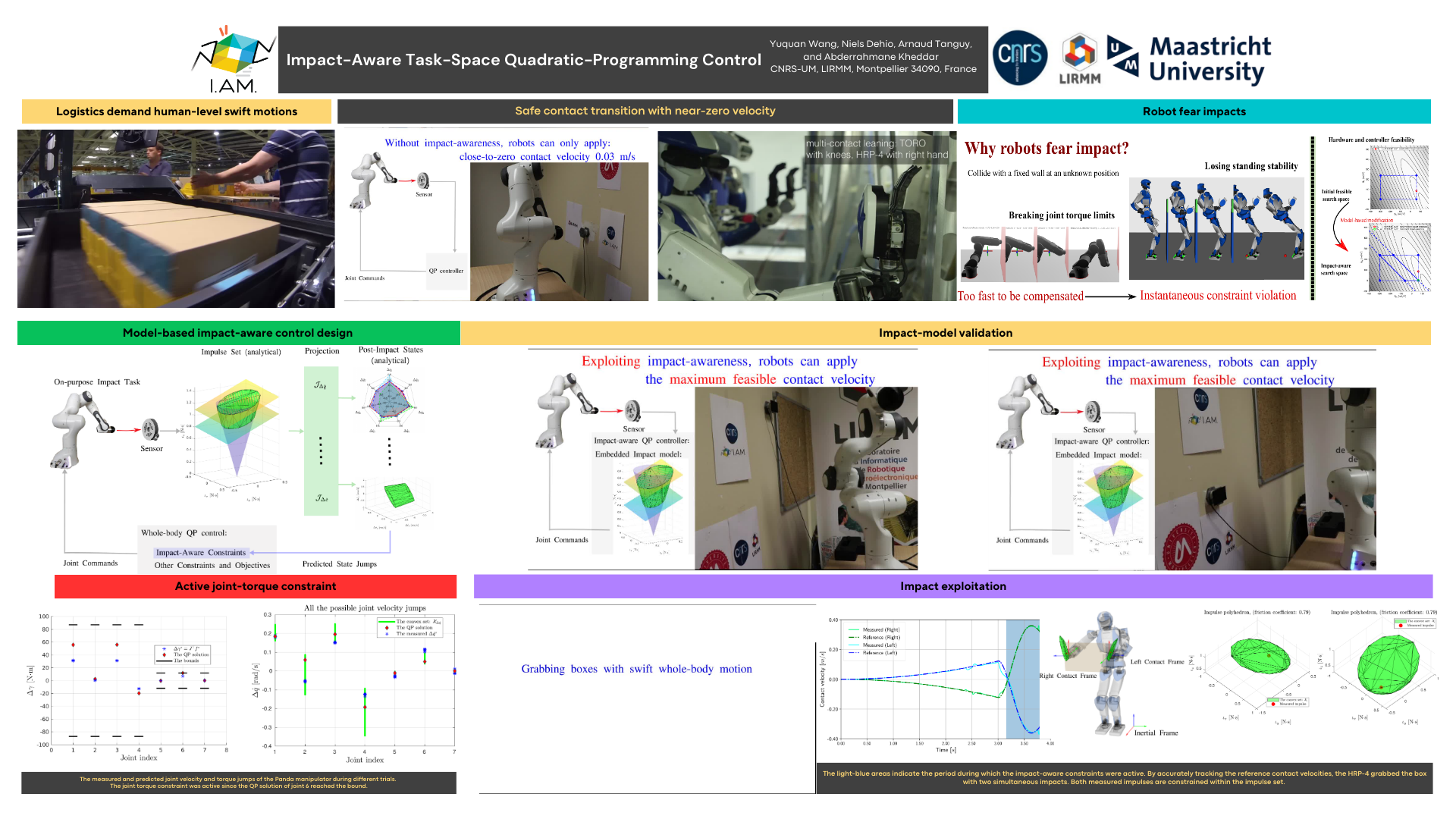
IJRR paper publicly available: Impact-Aware Task-Space Quadratic-Programming Control
Published:
Published:
Our full-day workshop has been selected for IROS 2023 at Huntington Place in Detroit, Michigan, USA
Published:
Following the geometric approach, our implementation features efficient C++ code and provides analytical gradients. Please feel free to give it a try!
Published:
On June 4th, we will organize the workshop from 09:00am to 05:00pm in time zone: GMT +8.
Published:
This is the first frictional impact model in three dimensions developed for robot applications. As an illustration, the figure below shows the moments corresponding to (1) the initial state, (2) the end of compression, and (3) the end of restitution during the impulse evolution. 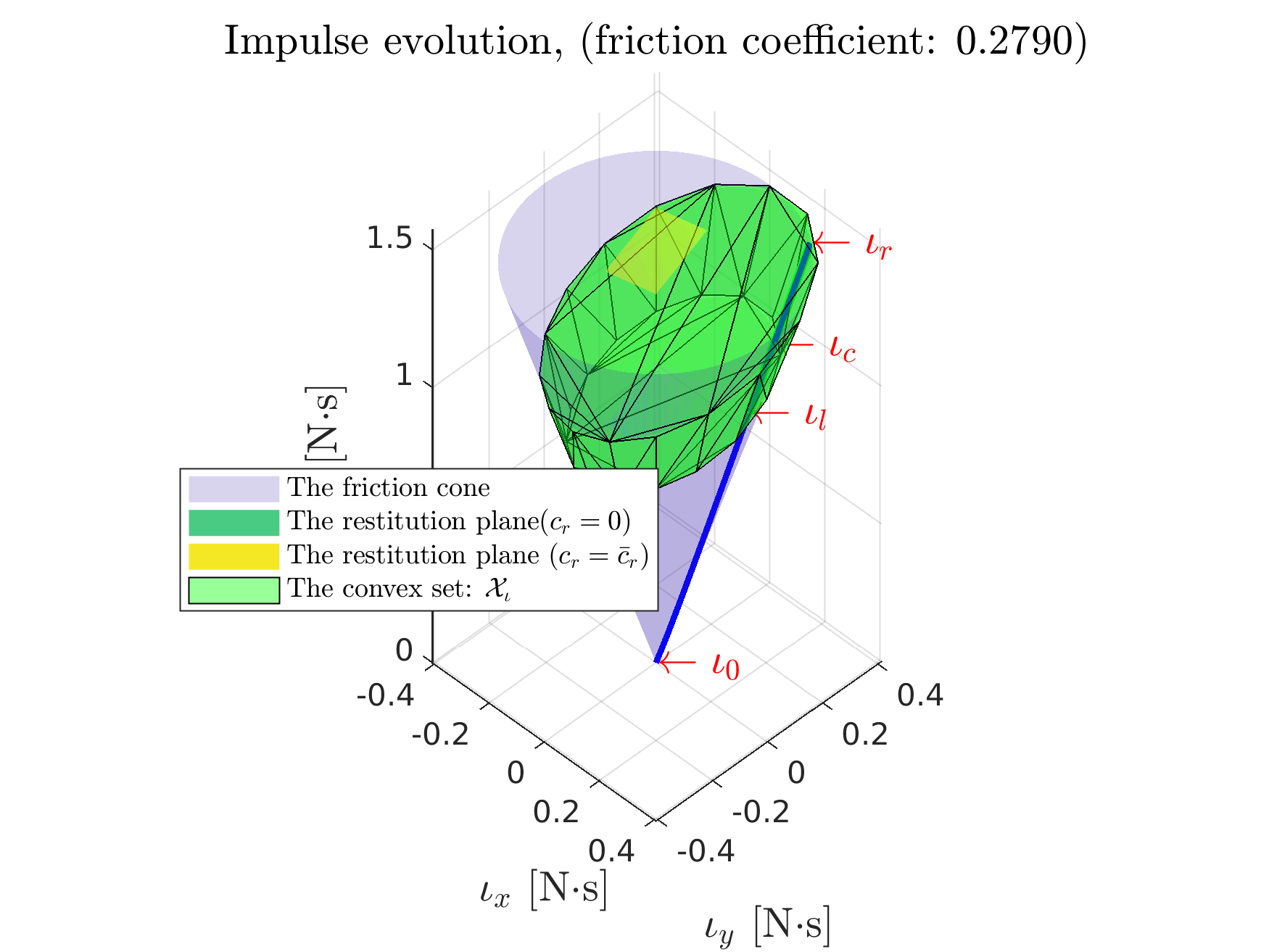
Published: