IJRR paper publicly available: Impact-Aware Task-Space Quadratic-Programming Control
Published:
When I was a child, my hobby was to disassemble toys for new creations. The interest in machines stayed with me through my education at Beijing Jiaotong University and led me to become a roboticist. After years of adventure, I became interested in developing robots with unprecedented speed and agility, leading to my current research focus on high-dynamic motion generation.
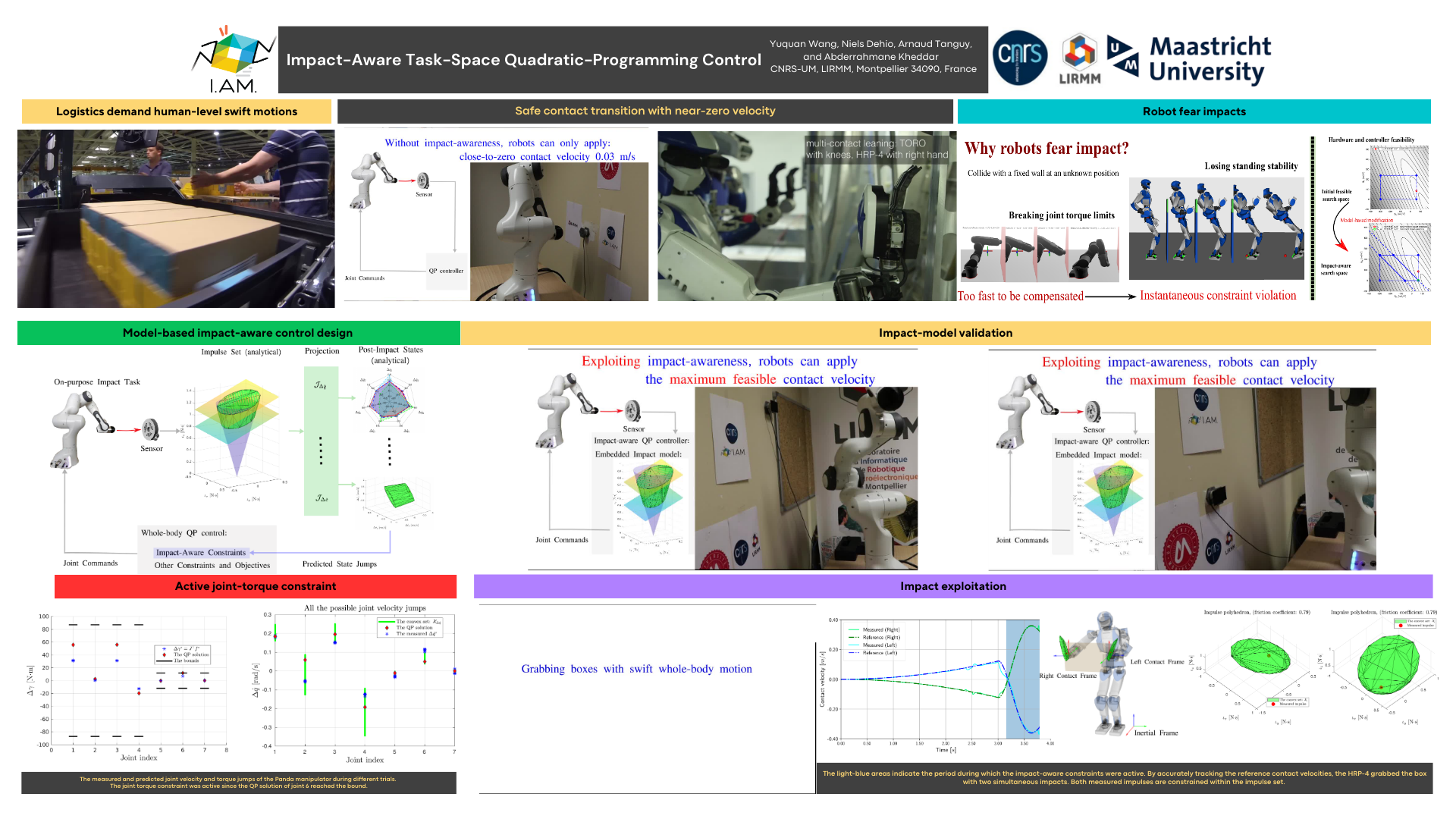
Generating on-purpose impacts with kinematic-controlled robots is challenging. The impulsive forces might damage the hardware, break the balance margin, and lead to undertermined behavior. Without dedicated hardware and controllers, robots typically operate at a near-zero velocity in the vicinity of contacts.
Together with my ex-colleagues at IDH, LIRMM, we are making the initial steps towards future control solutions, enabling robots not fear impacts. As an demonstration, we were able to generate maximum contact velocities with the humanoid robot HRP-4 without breaking established contacts or damaging the hardware.
This is a recent talk of mine about Impact-Awareness for Humanoid robots:
Published:
Our full-day workshop has been selected for IROS 2023 at Huntington Place in Detroit, Michigan, USA
Published:
Following the geometric approach, our implementation features efficient C++ code and provides analytical gradients. Please feel free to give it a try!
Published:
On June 4th, we will organize the workshop from 09:00am to 05:00pm in time zone: GMT +8.
Published:
This is the first frictional impact model in three dimensions developed for robot applications. As an illustration, the figure below shows the moments corresponding to (1) the initial state, (2) the end of compression, and (3) the end of restitution during the impulse evolution. 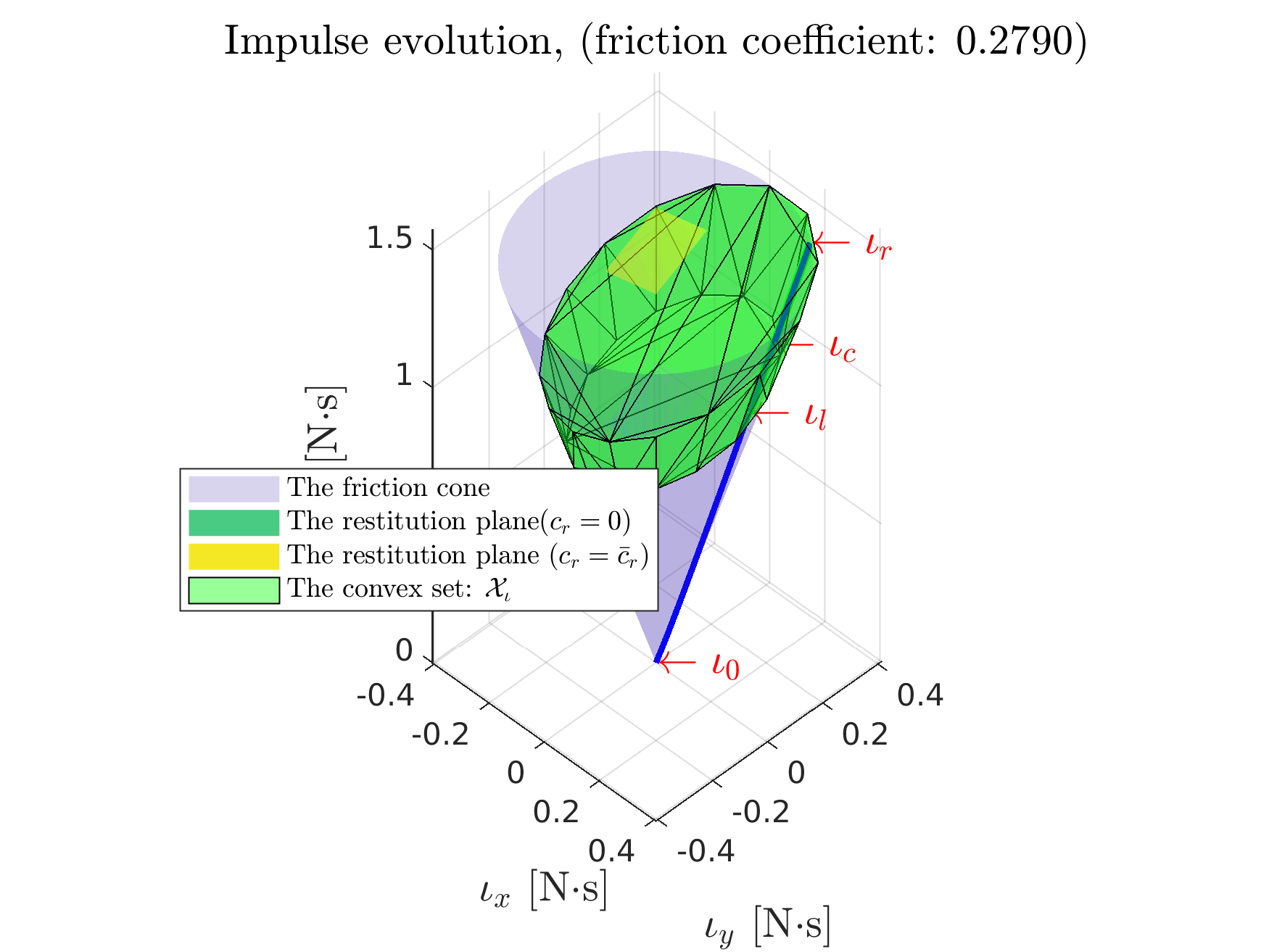
Published: